Статьи

С появлением азимутальных винто-рулевых колонок (азиподов), обеспечивающих невиданные ранее возможности маневрирования, начали развиваться новые классы буксиров. По районам плавания буксиры стали делиться на речные и морские, по видам операций буксировки на буксиры тянущие (tractor tug) и буксиры-толкачи.



Автор: Олег Губарев
Сообщить о проблеме
Виды буксиров в современном судостроении
Важную роль в проводке судов через узкости при заходе в порт и выходе из порта играют такие суда вспомогательного технического флота как буксиры. Буксиры известны с давних времен, так как задачи буксировки и доставки поврежденных судов в порт, а также обеспечения безопасного маневрирования в порту существовали все время. В конце XIX в. для выполнения этих задач был создан специальный класс вспомогательных судов - буксиры.
С появлением азимутальных винто-рулевых колонок (азиподов), обеспечивающих невиданные ранее возможности маневрирования, начали развиваться новые классы буксиров. По районам плавания буксиры стали делиться на речные и морские, по видам операций буксировки на буксиры тянущие (tractor tug) и буксиры-толкачи.
В процессе буксировки под воздействием различных усилий существует риск потери остойчивости и опрокидывания буксира.
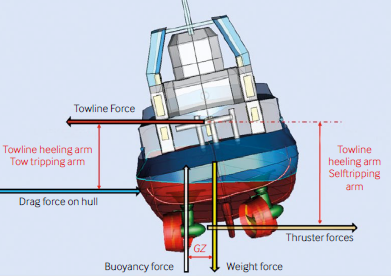
На буксир в процессе буксировки действуют разные усилия, приложенные к корпусу буксира, как это показано на рис. 1.
На буксир в процессе буксировки действуют разные усилия, приложенные к корпусу буксира, как это показано на рис. 1.
Рис.1. Силы, действующие на буксир в вертикальной плоскости. Источник
Towline Force - усилие в буксирном канате; Towline heeling arm – плечо кренящего момента, вызванное натяжением буксирного каната; Tow tripping arm - плечо кренящего момента при буксировке; Drag force on hull - сила сопротивления, действующая на корпус; Buoyancy force - выталкивающая сила; GZ - плечо статической остойчивости; Weight Force - сила тяжести, действующая на судно; Thruster forces - сила тяги движителя; Selftripping arm - плечо поперечного кренящего момента.
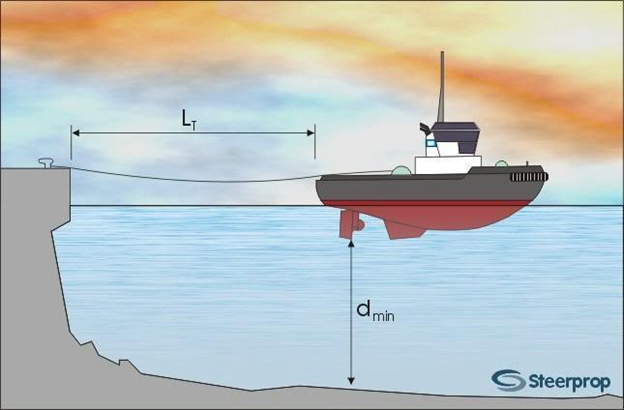
Одной из наиболее важных характеристик буксира является тяговое усилие на гаке, развиваемое при буксировке. Чтобы его определить проводят специальные испытания буксира на холостом ходу, как это представлено на рис.2.
Рис.2. Испытания на холостом ходу для определения тягового усилия на гаке. Источник
Lt - минимальная необходимая длина буксирного троса; dmin - минимальная необходимая глубина
По причинам практического характера испытания буксира для определения тяги на гаке проводят в порту у пирса. Чтобы исключить влияние швартовой стенки или пирса, длина буксирного каната должна быть как можно большей.
Буксиры с азиподами
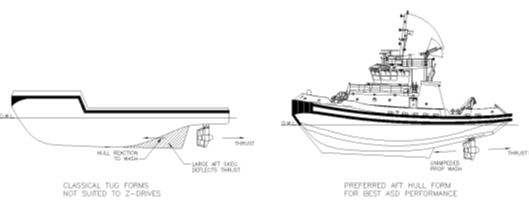
С развитием азиподов появился такой класс буксиров как роторный буксир (Rotor tug - ART), имеющий возможность разворота практически на месте. Для буксиров этого класса нужны особые обводы, как это показано на рис.3.
Рис.3. Сравнение обводов корпуса традиционного буксира и роторного буксира. Источник
Classical tug forms not suited to Z-drives - обычная форма корпуса, не подходящая для использования приводов модели Z - drive; Preffered aft hull form for best ASD performance - форма корпуса в кормовой части обеспечивает максимальную эффективность полноповоротных ВРК; D. W. L. - конструктивная ватерлиния; hull reaction to wash - воздействие набрасываемой струи на корпус судна; large aft skeg deflects thrust - скег в кормовой части отражает набрасываемую струю; thrust - упор; unimpeded prop wash - не встречающая преград набрасываемая струя
Особый класс буксиров, очень распространенный, представляют буксиры с кормовым расположением азиподов (Azimuthing stern-drive tug - ASD) - "Азимутальный буксир" - буксир с кормовым расположением азимутальных "полноповоротных" винторулевых колонок. Он подобен по типу традиционному двухвинтовому буксиру, однако обычный винт и гребной вал заменены на азимутальные винторулевые устройства.
Азимутальные устройства состоят из обычных винтов, оборудованных поворотными насадками, которые могут вращаться на 360 градусов для предоставления тяги в любом направлении без использования рулей. Наиболее распространена конструкция, получившая название "Z-Drive" благодаря особенности вала, который горизонтален на выходе из двигателя, вертикален по отношению к корпусу и снова горизонтален на ступице винта, в целом образует собой форму, подобную букве "Z". Также устанавливаются конструкции типа "L-Drive".
Рис.4. Конструкция буксира класса ASD (Azimuthing Stern Drive) корпорации Damen с кормовым расположением азиподов. Источник
Deckhouse - рубка; Heavy built - высокая прочность корпуса. Корпус буксира отличается повышенной прочностью ребер жесткости, повышенной толщиной листов обшивки, дополнительными кницами, подкрепляющими палубу, и дополнительными кранцами; Large tumblehome – значительный скос крыши рубки. Скос крыши имеет угол 40°, и рубка несколько отклонена назад, что облегчает ведение операций поблизости от борта буксируемого судна; Render/Recovery winch - спуско-подъёмная лебёдка. Гидравлическая двухбарабанная лебедка с удерживающим усилием на тормозе в 200 т; Fairleads – киповые планки; Double sausage fendering – два пояса цилиндрических кранцев. Цилиндрические кранцы по всей носовой части буксира, надежные кранцы D-образной формы по всему борту на уровне палубы и массивные цилиндрические кранцы по углам транца; Anchors - якоря; Round bilge hull - закругленный скуловой киль; Bow and hull form - нос и форма корпуса. Высокий и широкий нос, новая форма корпуса с зауженной "V образной" носовой частью и скуловые кили; Powerful propellers - мощные ВРК. Новые полноповоротные ВРК компании Rolls-Royce с винтами регулируемого шага, размещенные на корме буксира установлены под углом 7° для обеспечения максимальной эффективности; Painting - окраска. Fendering around the vessel - амортизация столкновений по всему борту; A heavy sheer strake 15 mm steel profile behind the fender for extra strength - прочный ширстрек толщиной 15 мм позади кранцев придает конструкции дополнительную прочность; Spacious decks - просторное палубное пространство.
Буксир карусельной конструкции
В наше время конструкция буксира предусматривает крепление буксирного троса на корме, а также корпус буксира сохраняет направление, заданное линией буксирного троса, с возможностью разворота на 360 градусов за счет создания упора азиподами. Новая карусельная конструкция буксира характеризуется возможностью изменения направления корпуса буксира независимо от линии буксирного каната. Данная карусельная конструкция состоит из большого горизонтально расположенного кольца, вращающегося вокруг надстройки и прикрепленного к кольцу буксирного троса. Такое крепление буксирного троса снижает кренящий момент и позволяет в полной мере использовать динамические усилия, прикладываемые к корпусу буксира для эскортирования судов.
Рис.5. Вид модели буксира карусельной конструкции, выполненной в масштабе. Источник
Инновационный тип буксира – дистанционно управляемый буксир (Проект RAmora)
В плане развития дистанционно управляемых безэкипажных судов имеет место целый ряд инициатив, в том числе со стороны спонсоров, например рассчитанная на долгосрочный период программа Advanced Autonomous Waterborne Applications (AAWA) корпорации Rolls-Royce, а также финская программа One Sea Autonomous Maritime Ecosystem (2016-2025 гг.)
Рис.6. Компьютерная графика демонстрирует внешний вид безэкипажного буксира проекта RAmora при буксировке судна. Источник
Известная проектная компания Robert Allan Limited (RAL) недавно пригласила промышленных инвесторов оценить перспективы эксплуатации буксира, спроектированного для работы в опасных условиях без риска для экипажа. Канадская компания указала, что разработка безэкипажного буксира (дрона) открывает новые возможности для операций буксировки. В результате более чем годичной программы НИОКР компания разработала концепцию нового безэкипажного буксира (проект RAmora).
Одно из судов серии TOWBoT (Tele-Operated Workboat или Tug), судно проекта RAmora 2400, разработано специально для помощи судам при проводке в порт и для швартовных операций. Безэкипажный буксир с хорошей дистанционной управляемостью и тяговым усилием на гаке, составляющим около 55 т, оснащен комбинированной пропульсивной установкой и имеет значительную емкость аккумуляторных батарей для проведения буксирных операций в потенциально опасных условиях – у терминалов СПГ и в случае пожароопасных ситуаций.
Согласно заявлениям представителей компании RAL, буксир проекта RAmora спроектирован с сохранением всех возможностей традиционного буксира, и буксир, дистанционно управляемый оператором, может работать в тандеме с обычным буксиром, управляемым экипажем. Опытный оператор, дистанционно управляющий буксиром проекта RAmora с командного буксира будет использовать функцию "виртуальной реальности", встроенной в консоль управления буксиров проекта RAmora, включая видео картинку с обзором на 360 градусов, и бортовую систему датчиков, работающую в режиме реального времени для обеспечения безопасного и эффективного управления безэкипажным буксиром. Система управления обеспечивает оператору интерфейс в режиме реального времени. Система управления спроектирована совместно с канадской компанией International Submarine Engineering, и ее принцип позаимствован у систем управления телеуправляемыми подводными аппаратами (ТПА), автономными подводными аппаратами и системами управления надводными безэкипажными судами.
Одно из судов серии TOWBoT (Tele-Operated Workboat или Tug), судно проекта RAmora 2400, разработано специально для помощи судам при проводке в порт и для швартовных операций. Безэкипажный буксир с хорошей дистанционной управляемостью и тяговым усилием на гаке, составляющим около 55 т, оснащен комбинированной пропульсивной установкой и имеет значительную емкость аккумуляторных батарей для проведения буксирных операций в потенциально опасных условиях – у терминалов СПГ и в случае пожароопасных ситуаций.
Согласно заявлениям представителей компании RAL, буксир проекта RAmora спроектирован с сохранением всех возможностей традиционного буксира, и буксир, дистанционно управляемый оператором, может работать в тандеме с обычным буксиром, управляемым экипажем. Опытный оператор, дистанционно управляющий буксиром проекта RAmora с командного буксира будет использовать функцию "виртуальной реальности", встроенной в консоль управления буксиров проекта RAmora, включая видео картинку с обзором на 360 градусов, и бортовую систему датчиков, работающую в режиме реального времени для обеспечения безопасного и эффективного управления безэкипажным буксиром. Система управления обеспечивает оператору интерфейс в режиме реального времени. Система управления спроектирована совместно с канадской компанией International Submarine Engineering, и ее принцип позаимствован у систем управления телеуправляемыми подводными аппаратами (ТПА), автономными подводными аппаратами и системами управления надводными безэкипажными судами.
Проект RAmora предусматривает использование судового крыльчатого движителя, монтируемого в носовой/кормовой части буксира для обеспечения высокой маневренности во всех направлениях, используя опыт, накопленный при эксплуатации буксира нового проекта RAVE компании RAL. Обводы корпуса, спроектированные для обеспечения высокой остойчивости и хорошей мореходности на волне, являются результатом обширных исследований методами вычислительной гидродинамики и испытаний в опытовом бассейне. За счет использования принципа TOWBoT дистанционного управления буксировкой отпадает необходимость иметь на буксире рубку, помещения для экипажа, системы жизнеобеспечения и спасательные средства. Буксир проекта RAmora, как заявляется, будет проще в управлении и более компактен чем обычный буксир аналогичной мощности.
Кроме того буксир проекта RAmora 2400 будет использовать дополнительное инновационное оборудование. По всему периметру буксира будут установлены кранцы цилиндрической формы, что позволит буксиру выполнять функции толкача. Согласно заявлению компании RAL, безэкипажный буксир более безопасен в ситуациях повышенного риска, например, при работе у носа буксируемого судна, а также в узкостях и шлюзовых камерах.
Как мы видим, установка новых движителей, азимутальных ВРК, открыла совершенно новые перспективы для разработки конструкций буксиров, обладающих высокой маневренностью. И в тоже время продолжаются поиски инновационных конструкций, и идет разработка инновационных проектов буксиров, в том числе безэкипажных, направленных на обеспечение безопасности при буксировке.
Автор: Олег Губарев
Другие новости компании «Судостроение.инфо (Sudostroenie.info)»

Судоходство
19 Апреля 2024

Судоходство
18 Апреля 2024

Показать еще новости

Актуально




Самые читаемые
Определен перечень критической промышленной продукции в области судостроения
17 Апреля 2024
В Японии впервые в мире проект океанского судна получил одобрение по 3D-модели
16 Апреля 2024
"Газпромнефть Шиппинг" поддерживает развитие кадрового потенциала судоходной отрасли
13 Апреля 2024
ЦТСС разработает концепт-проект судоремонтного предприятия в порту Усть-Луга
15 Апреля 2024

НОВЫЕ КОМПАНИИ